

Équipe AutoRob : Autonomous Robots

Responsable d’équipe :
Henrique FAGUNDES-GASPAROTO (Dr)
Enseignant-chercheur
henrique.gasparoto@isen-ouest.yncrea.fr
Nombre de permanents : 3
Nombre de doctorants : 1
Mots clés :
- Robots autonomes
- Mission des multi-robots
- Systèmes multi-environnement
- Conception modélisation et prototypage
- Adaptabilité
Projet de recherche
Conception et coordination de flottes de drones autonomes, hybrides et reconfigurables pour la réalisation des tâches complexes
L’utilisation de flottes de drones pour effectuer des tâches complexes dans notre société nécessite encore un nombre important d’avancées. Ces avancées technologiques passent naturellement par la proposition de nouvelles architectures robotiques : mécanique (structure, actionneurs…), sensorielle, électronique, communication et logicielle (algorithmes de coordination…). Le cœur d’expertise de l’équipe AutoROB (autonomous robots) du LabISEN est axé principalement autour du développement de flotte de drone autonome possédant des capacités d’adaptations à son environnement. L’équipe s’intéresse notamment aux différents problématiques liés à la conception et au déploiement de nouveaux drones permettant d’accomplir des tâches irréalisables avec des drones classiques. L’objectif premier étant d’être capable de fournir de nouvelles structures de robots autonomes pour différents projets et de maîtriser les différents aspects de conception, de contrôle/commande et d’intelligence lors de mission complexes en flotte hétérogène.
Axes de recherche
Algorithmes pour la coordination de flottes hétérogènes de robots autonomes.
Les algorithmes de coordination pour les flottes de robots hétérogènes autonomes révolutionnent la manière dont ces robots interagissent et travaillent ensemble de manière efficace. Ces algorithmes permettent la coordination et la collaboration harmonieuse entre différents types de robots, tout en maximisant ainsi l’efficacité globale de la flotte dans l’accomplissement des missions complexes.
Nouvelles architectures (mécanique, sensorielle, électronique et logiciel) de robots autonomes adaptatifs
Les nouvelles architectures de robots autonomes adaptatifs repoussent les limites de la robotique moderne. Au niveau mécanique, par exemple, ces robots sont dotés de structures reconfigurables pliables, flexibles ou modulaires, leur permettant de s’adapter à différentes tâches et environnements de manière fluide et efficace.
Nouveaux actionneurs pour robots autonomes adaptatifs
Les nouveaux actionneurs mécatroniques pour robots autonomes adaptatifs sont en train de révolutionner la manière dont ces robots interagissent avec leur environnement, en utilisant notamment la mécanique sans contact grâce aux accouplements magnétiques passifs, par exemple.
Ces accouplements magnétiques offrent des avantages significatifs en termes de performance, d’efficacité et de fiabilité. Cette technologie de mécanique sans contact présente plusieurs avantages pour les robots autonomes adaptatifs. Tout d’abord, elle élimine les problèmes d’étanchéité, de frottement et d’usure associés aux liaisons mécaniques traditionnels, ce qui augmente la durabilité et la fiabilité du système. Ainsi, les accouplements magnétiques permettent une transmission de puissance plus efficace, minimisant les pertes d’énergie et améliorant ainsi l’efficacité globale du robot. De plus, ils offrent également une plus grande flexibilité et adaptabilité car ils peuvent intrinsèquement s’ajuster et s’adapter aux variations de charge ou aux changements de conditions de manière plus fluide. Cela permet aux robots autonomes adaptatifs d’effectuer des mouvements plus précis et de s’adapter rapidement à différentes situations. Finalement, les accouplements magnétiques offrent une plus grande sécurité pour les êtres vivants et leurs environnements. En cas de surcharge ou de collision, les accouplements magnétiques peuvent se désengager automatiquement, protégeant ainsi le système et réduisant les risques de dommages.
Exemples de réalisations concrètes
Drone multi-copter à bras pliable

Les drones multi-copters à bras pliables offrent une polyvalence accrue lors des missions. Les bras pliables permettent d’ajuster facilement l’angle des moteurs et des hélices, offrant ainsi une plus grande manœuvrabilité en vol. Le but dans ce projet est de se servir d’une structure de drone classique multi-copter tout en développant et en ajoutant un système mécatronique pour permettre à ce dernier de plier ses bras. L’ajout de ce système, ainsi que le dimensionnement orienté mission, permet alors de penser à d’autres modes de fonctionnement. Ce projet apporte notamment le développement de nouvelles lois de commandes ainsi que de nouveaux algorithmes pour mener à bien des missions complexes.
Conception et fabrication d’un propulseur vectoriel reconfigurable magnéto-couplé pour les robots sous-marins

Un propulseur vectoriel reconfigurable magnéto-couplé pour les robots sous-marins est un système de propulsion avancé qui combine les avantages des propulseurs vectoriels et des accouplements magnétiques. Ce type de propulseur permet de générer une poussée dans différentes directions en utilisant des forces magnétiques pour reconfigurer la direction du vecteur de poussée.
Un propulseur vectoriel reconfigurable magnéto-couplé offre la flexibilité et l’adaptabilité nécessaires pour optimiser la propulsion de drones sous-marins en fonction des besoins de la mission et des conditions environnementales. Il permet d’ajuster la configuration des propulseurs pour une meilleure manœuvrabilité, une résistance accrue aux courants et une optimisation de l’efficacité énergétique.
L’image montre le prototype d’un propulseur vectoriel reconfigurable magnéto-couple qui intègrera un drone sous-marin capable de se transformer, changeant ainsi sa posture et ses fonctions.
Articulation robotique à raideur variable

L’objectif de ce projet est de développer une articulation robotique alliant la rigidité et la précision des bras robots classiques à la sécurité et l’optimisation énergétique de la robotique souple. La possibilité de varier la raideur de l’articulation présente de nombreux avantages. Elle permet au robot d’adapter sa réponse en fonction des tâches à accomplir et de s’ajuster aux différents environnements de travail. La précision et la rigidité des bras robots classiques sont maintenues, tandis que la flexibilité de la robotique souple est ajoutée grâce à un ressort à raideur variable. Dans ce projet, l’innovation porte notamment sur un ressort magnétique performant, permettant ainsi de régler la raideur de l’articulation sans recourir à des frottements mécaniques. De plus, en cas de surcharge ou de contrainte excessive, le ressort magnétique décroche pour prévenir les dommages potentiels, assurant ainsi la sécurité des opérations en protégeant les êtres vivants.
Banc d’essai de la chaîne cinématique de propulsion pour l’eau et l’air
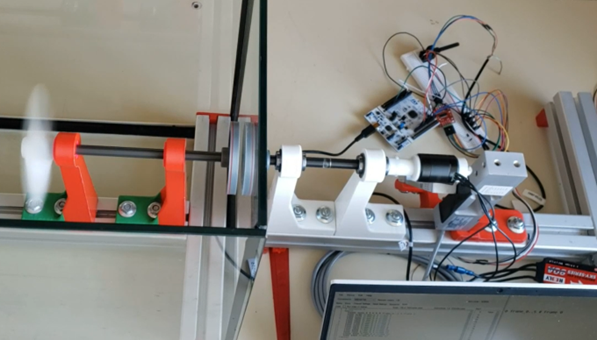
Un banc d’essai de la chaîne de transmission cinématique d’un propulseur, de la motorisation jusqu’à l’hélice, utilisant un accouplement magnétique, est un système permettant de tester et d’analyser la performance de cette transmission. Il se compose d’un moteur, d’un ensemble d’accouplement magnétique et d’une hélice. L’accouplement magnétique est utilisé pour transmettre le couple du moteur à l’hélice sans contact mécanique direct, grâce à l’interaction des champs magnétiques. Il permet le teste de différentes hélices en différents mieux. Ce banc d’essai permet de mesurer les puissances, la vitesse, le couple et l’efficacité de la transmission. Il permet également d’évaluer la qualité de l’accouplement magnétique en termes de stabilité, de fiabilité et de perte d’énergie pour différents types de coques. Des données sont recueillies lors des essais, permettant d’optimiser la conception de la chaîne de transmission cinématique et d’assurer son bon fonctionnement dans des applications réelles.
Membres de l’équipe



Publications récentes
Dernière mise à jour : mai 2023